

Related: Season Two of HDT Talks Trucking Podcast Now Available
Q&A: AI Expert Talks Autonomous Trucks
Richard Bishop, AI industry analyst and intelligent vehicle applications specialist, spoke with Jim Park about autonomous trucks for an episode of the HDT Talks Trucking podcast.
April 6, 2020

What's the future of autonomous trucks?
Photo: Daimler
7 min to read
Richard Bishop, AI industry analyst and intelligent vehicle applications specialist, spoke with Jim Park for an episode of the HDT Talks Trucking podcast.
Bishop is second vice chair of the Automated and Electric Study Group of the American Trucking Associations' Technology & Maintenance Council. He lectures as an expert in intelligent vehicle systems and contributes regularly to Forbes.com, writing about the latest developments in intelligent trasportation systems and intelligent vehicles.
Here are a few excerpts from that interview. (This interview has been lightly edited for length and clarity.) You can listen to the entire interview here

Richard Bishop
Photo: Richard Bishop
HDT: Critics of driverless trucks have been asking how these trucks can be secured from hacking and even against possible incidents of hijacking or cargo theft. Some of those questions evolve from current generations of Advanced Driver Assistance Systems (ADAS) that are programmed to slow or stop to avoid driving into the back of a car. In certain scenarios, one would have only to pull a car around in front of the truck and slow down to make the truck respond accordingly. How do the AI experts plan to prevent or mitigate such a scenario?
Bishop: The story about ADAS is kind of apocryphal, because of course with the human driver there, they can back up or do something in order to exit that situation. I don't have a full and solid answer for you on that. I know that the fleet customers say we have to avoid that situation, so some countermeasures will be put in place. But that's really all I can say about it. To me, it's a very theoretical kind of thing, but it can't be ignored. I think at an engineering level there are things you can do.
HDT: As far as the artificial intelligence behind self-driving trucks goes, I imagine it's probably pretty easy to get the computers to keep the truck between the lines under ideal conditions. But when you're building systems to manage an infinite number of variables, such as intersections, different turn radii on roadways, different traffic densities, even figuring out the difference between a deer and a human in the road. Can you explain in lay terms how driverless trucks see the world and how they respond to it?
Bishop: I'll do the best I can. There are really a couple of layers. One is the more traditional technique where trucks and cars read lane lines and know where to keep the vehicle laterally. And they can use radar to see basic sorts of obstacles. But there's always a human somewhere in the loop there with today's systems. So when it comes to completely driverless, they're building on top of that with this idea of AI, artificial intelligence. It's a very technical field. There are different schools of thought as to how to do that.
You need labeled data to teach an AI system what's what – you know, this is a person, this is a car, etc. And these systems can learn very quickly. It's an effective approach, but even that is seen as not quite enough. And other methods are being put out there. The deployments are going to start with rather simple environments, like Interstate highways. We'll learn how the AI responds there and then gradually move into more complex environments where the AI is more stressed.
It's important to look at some of the numbers that have been put out there. Waymo is the best source. They are best known for building robo-taxis, but they also have a very active truck automation program. They say they're building the world's most intelligent driver, which can drive a truck and drive a car very well. They've run something like 20 million miles now in terms of just testing on real roads and they then take that into simulation.
Take a certain situation, someone cuts the truck off, for example. They look at the speed of the truck, the speed of the car, weather conditions, traffic density, that sort of thing, and in simulation they then change some or all of those parameters. They've done that with something like 20 billion miles in virtual space. And Waymo is not the only company doing that. So, this software has been extensively exercised across a lot of what does happen or even just what could happen in the real world. It's still not 100%, because we know the real world, you never get to 100%. That that's how it's going to go forward.
HDT: Could you explain how an autonomous truck navigates certain traffic scenarios, such as entering a freeway from an on-ramp, for example? Is the truck relying on "memory" because it has seen that pattern before and it's following a set of instructions, or does the truck make its own decisions based on previous experiences of that situation? Is it a repetition of a previous experience or is it a brand-new learning experience every time that scenario happens?
Bishop: It's not repetition. I wouldn't even call it a learning thing. I think I would call it applying the learning that it already has, just as a teenager or any new driver starts to figure out how to do a merge. The first one's kind of scary but they have objectives. The objective is to get up to speed that matches the highway speed and to occupy the lane you're merging into. It's aware of other vehicles in the vicinity and of their speed, and it's using your own control factors, like steering, brakes, and throttle to reach that objective. So, in a lot of ways it's acting like we do as drivers.
HDT: Let's talk about regulations for a minute. This is going to come into the regulatory sphere sooner or later. When it comes to setting and performance requirements for level-four self-driving trucks, how are those standards going to be determined, and how will the various AI companies prove that they can meet them?
Bishop: Well, in terms of what has to be accomplished, that's already pretty clear now in terms of human drivers on the road. We have certain driving codes, codes of law that say this do this, do not do that, and you have to stay within these boundaries. The definition of safe driving is already out there, and these vehicles have to comply with that. We don't need a new or a special definition for automated driving in that sense. But to assert and certify that they're safe, I think it will come down to a deep articulation of the safety case, as the terminology goes. It won't be just, you know, here's our anomalies per million miles and that kind of thing.
There are some standard processes out there, like ISO 26262 that is focused on functional safety. It's very mature and used across aviation and other areas. Those discussions will happen between an AI company offering this equipment and a potential fleet customer. That fleet will want to see that data and understand it to their satisfaction.
Under the current presidential administration, the federal government doesn't want to be in the role of assessing that on their own, because it is so highly technical and unique to each company as well. So, it really can't be done by the federal government. And in fact, the same has been true for cybersecurity. The federal government knew several years ago when they got into cybersecurity for cars. There are so many ways to do cybersecurity that relate to your specific design of a vehicle that there's no way the feds can go in there and study it and figure it out. They have to rely on the companies out there to follow best practices. That's how NHTSA (the National Highway Traffic Safety Administration) handles cybersecurity for cars.
HDT: The American Trucking Associations is talking about a shortage of as many as 160,000 over-the-road drivers by 2028. That's, that's an alarming number. Do you think this technology will be a solution to the driver shortage? And if so, when do you think we'll start making a meaningful dent in those numbers?
Bishop: I think it will be a solution. I think [the driver shortage] is THE factor that has been pushing this whole thing forward economically. And, yes, I think we'll get there. At what pace? That depends on how fast driverless trucks will scale. And that ripples back into what's your price per mile for moving freight, which is also now affected by shortage of drivers. If you're a fleet that's running driverless, you're going to eat everybody else's lunch and that's going to really drive the competitive factor.
Subscribe to Our Newsletter
More Safety & Compliance

Wabash Trailers Recalled for Improperly Installed Underride Guards
More than 900 Wabash dry van trailers may not comply with the Federal Motor Vehicle Safety Standard for rear impact guards.
Read More →
Why K&B Trucking Is Embracing AI and Driver Safety Technology
Crunching data and embracing artificial intelligence are key in K&B Trucking's safety efforts, says the company's safety director.
Read More →
The Hidden Problem Behind FMCSA's ELD Revocations
NMFTA researchers say dozens of registered ELDs may be built on the same software platforms, allowing compliance and security concerns to persist even after individual devices are removed from the market.
Read More →
ATRI Wants Motor Carriers for Driver-Facing Camera Study
In this new study, the American Transportation Research Institute will explore how driver-facing cameras can impact safety and operational metrics in trucking fleets.
Read More →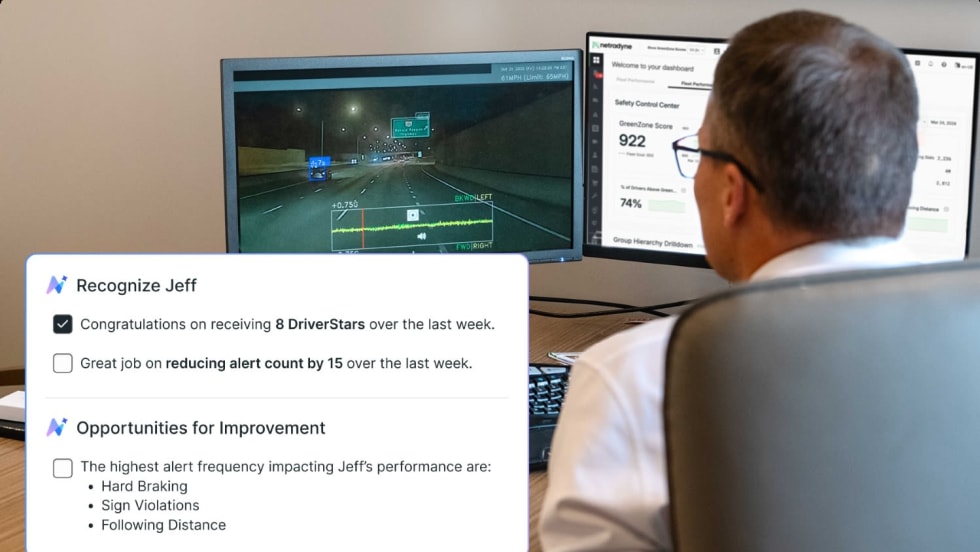
Netradyne Intelligence Uses New AI Agents to Automate Response to In-Cab Camera Data
The company called the next-generation in-cab camera safety platform "a fundamental shift from systems that report on what happened to systems that actively drive what should happen next."
Read More →Mack, Volvo Issue ‘Do Not Drive’ Recall on Possible Wheel-Offs
Owners will be sent advance notice not to operate their affected vehicles until the remedy is performed.
Read More →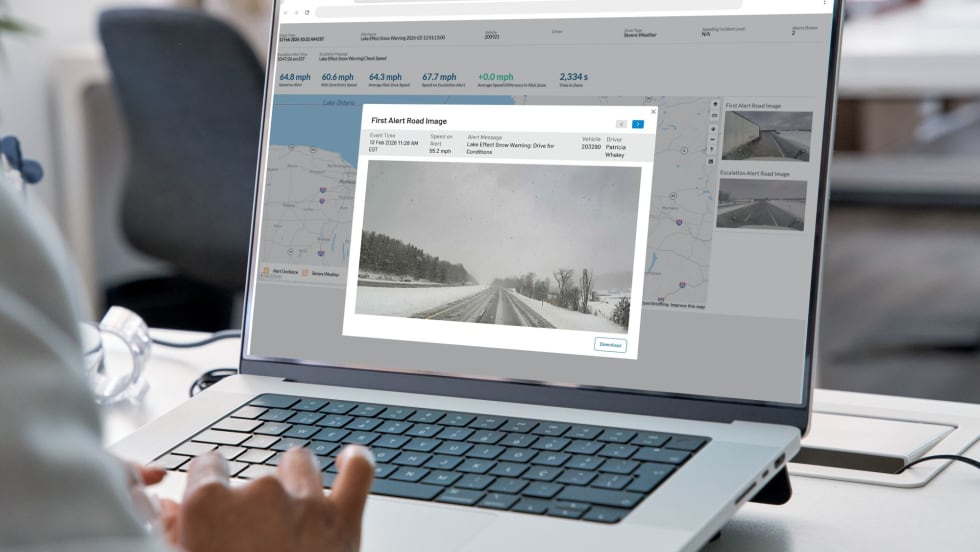
Fleetworthy Integrates Lytx Video Snapshots into Safety+ Platform
A new Fleetworthy-Lytx integration gives fleet managers access to video context alongside safety event data, streamlining driver coaching and incident review.
Read More →
How Waste Connections is Using Data, Telematics, and AI
How do you manage and maintain more than 18,000 connected trucks? Data. Lots of it.
Read More →
Fleet Advantage: Top Logistics Fleets Outperform National Safety Benchmarks
Fleet Advantage's latest TRUST Safety Index found leading logistics fleets maintained significantly lower out-of-service rates and stronger safety scores than national averages, while highlighting persistent challenges related to tires, brakes, and unsafe driving behaviors.
Read More →
Why Fleet Data Matters More Than Ever at Waste Connections [Watch]
Waste Connections' Chuck Palmer explains how telematics, predictive maintenance, safety analytics, and AI help keep vehicles on the road and drivers safe in this episode of HDT Talks Trucking.
Read More →