
Scania Working on Self-Driving Truck
In collaboration with KTH Royal Institute of Technology in Stockholm, Swedish truck maker Scania is developing a thinking and self-driving truck. The goal is to increase accessibility on roads and reduce energy consumption
In collaboration with KTH Royal Institute of Technology in Stockholm, Swedish truck maker Scania is developing a thinking and self-driving truck. The goal is to increase accessibility on roads and reduce energy consumption.
KTH and Scania are preparing a wireless network system in which vehicles communicate with each other in real time. The system detects a route via GPS and, for example, obtains information about a road closure in order to take advantage of the vehicle in the best route. Also, by communicating with traffic lights, a truck knows whether braking is necessary or whether it can continue at the same speed.
One part of the project is dealing with so-called "platooning." This is when, for example, a convoy of six to eight vehicles follows a leading truck and they all maintain the distances between each other. With today's adaptive cruise control, the distance to other vehicles is about 25 meters (about a second in time). If the trucks could run closer together, the drag would be reduced, lowering fuel consumption by up to 20 percent.
Henrik Pettersson, the project coordinator from Scania, says, "If we can show that we can save fuel and create a more efficient transport system, there is incentive for continued development."
As a part of the project Scania/KTH and nine other teams - including three from Sweden - recently participated in a test in Holland. The purpose of the event was to evaluate, under real-world conditions, the network systems that different vehicle manufacturers are currently developing. The best results were achieved by a German team using a Volkswagen Passat and an Audi Q7. Scania/KTH placed fourth.
"We are very pleased with the results and the outcome of the test, " says Pettersson. "It showed that it is possible to execute platooning with different types of vehicles - from small Smart cars to heavy trucks - all using different control strategies. The Scania/KTH team performed well despite the disadvantage using a truck."
More Equipment

Atlas Expands Kodiak Driverless Truck Fleet in Permian Basin
Atlas Energy Solutions is expanding autonomous frac sand hauling in the Permian Basin with a second load-out location and plans for 100 driverless trucks by mid-2027.
Read More →
Putting Mack’s Command Steer to the Test
A test drive of Mack’s Command Steer active steering system evaluates how it can make truck driving easier and less tiring.
Read More →
Mack, Volvo Expand DEF Derate Software Updates
The updated software gives Mack and Volvo truck owners more time to address DEF-related issues before the engine derates or the vehicle goes into reduced-speed inducement, following new EPA guidance.
Read More →
Rush, MCT Team Up to Grow Refrigeration Service Network
The joint venture will operate MCT's network of Carrier Transicold dealerships and mobile service locations, with the companies promising greater service capacity and uptime for refrigerated fleets.
Read More →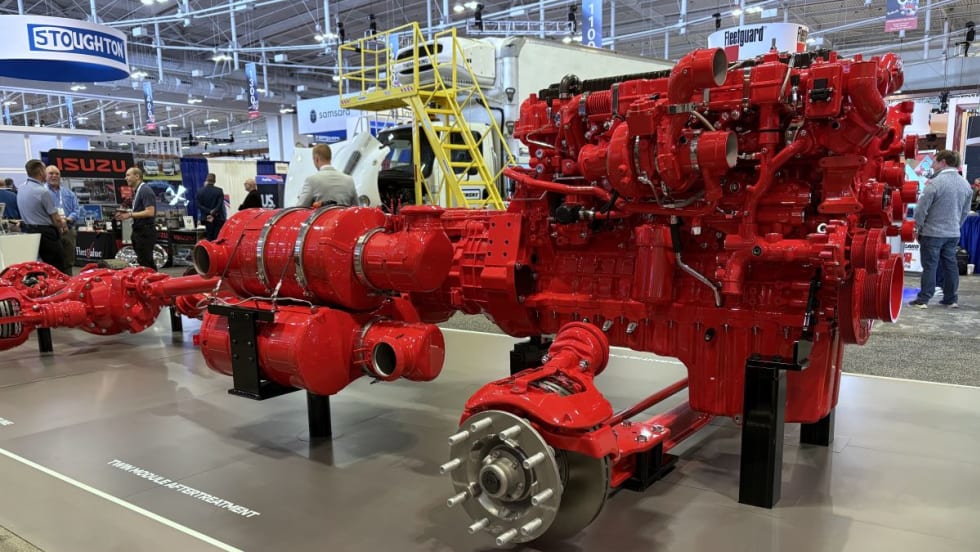
Cummins Adjusts 2027 Engine Rollout After EPA Proposal
The engine maker will gradually introduce its new Model Year 2027 diesel engines while continuing to offer current models during the transition, citing the EPA's proposed emissions rule changes.
Read More →
Aurora Rolls Out Next Generation of Driverless Trucks for Commercial Freight
Aurora's latest autonomous trucks it's rolling out with International feature lower-cost hardware designed for a million miles as the company expands commercial driverless freight operations across the U.S. Sun Belt.
Read More →
Peterbilt 589 Spotlight: A Close Look at a Custom Working Truck [Video]
There's more to this customized Peterbilt Model 589 and Great Dane refrigerated trailer than chrome and stainless (although there's plenty of that too!) A veteran driver explains the design choices and practical features behind this working truck.
Read More →
Continental Expands Retread Lineup With New ContiTread HDL 5 EP
New long-haul drive retread is designed to improve fuel efficiency, extend tread life, and lower fleets' cost per mile.
Read More →
EPA Proposal Could Ease 2027 Truck Costs and Buying Uncertainty
The proposal doesn't change the tougher NOx standard, but it would revise key implementation requirements that manufacturers say have driven up costs and complicated fleet purchasing decisions.
Read More →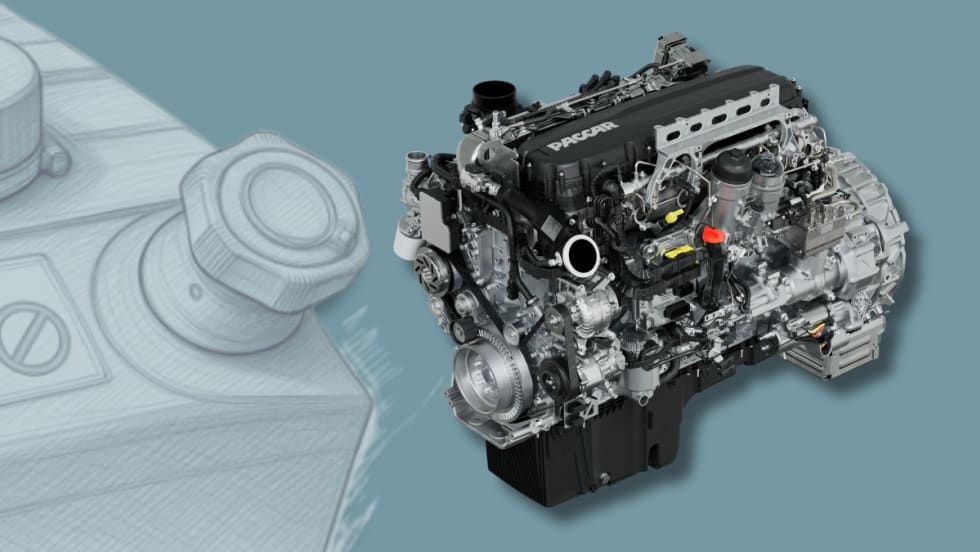
Cummins, Paccar Ease DEF Derates After EPA Guidance
Updated diesel engine software gives truck operators more time to address emissions-system issues while staying compliant with EPA emissions standards.
Read More →