
Cummins, Bosch, and KPIT to Launch Open Telematics Portal
Cummins, Bosch, and KPIT are teaming up with Eclipse CANought on a new open-source project for commercial vehicle telematics.


Cummins announced a collaboration with Bosch Global Software and KPIT to launch a new open telematics portal.
Image: HDT Graphic
Cummins announced a collaboration with Bosch Global Software and KPIT to launch a new open telematics portal — an open-source project for commercial vehicle telematics.
It will be launched as part of the Eclipse Software Defined Vehicle project.
Reduced Costs, Better Fleet Intelligence
This is a part of the broader Open Telematics initiative to reduce the costs required to develop telematics applications in commercial vehicles.
“Cummins is partnering with two industry experts on this project, Bosch Global Software and KPIT, two companies that have extensive expertise in vehicle telematics and CAN communications,” said Brad Sutton, executive director, powertrain engineering, Cummins.
“Our combined expertise and experience enable us to innovate and create new solutions faster than we could individually, creating real value for our customers and their businesses.”
Eclipse CANought creates industry-specific capabilities focused on standardizing and securing access to the CAN (Controller Area Network) bus to more easily enable features, such as over-the-air software updates.
A CAN bus is a serial communications network that interconnects vehicle ECUs (Electronic Control Units), acting as the central nervous system for the vehicle.
These capabilities significantly reduce the time and cost required to develop connectivity applications that access and update vehicle ECUs. This greatly simplifies software integration work for OEMs (original equipment manufacturers) and suppliers.
“This collaboration among industry leaders is just one more example of how the open-source model fuels innovation in the automotive sector, making advancements accessible industry-wide,” said Mike Milinkovich, executive director at the Eclipse Foundation.
“CANought is particularly exciting as it merges open-source collaboration with established industry standards and architectures such as CAN and SAE J1939, accelerating the development of Software Defined Vehicle applications."
CANought Telematics Platform Coming to Market in 2025
Eclipse CANought provides standard and secure access to vehicle ECUs for telematics applications.
It complements an existing project, Eclipse Kanto, which provides a hardware-agnostic solution for running containerized applications across any variety of telematics hardware.
“At Bosch Global Software, we believe that coordinated software updates are crucial for the commercial vehicle industry as more countries implement new regulations for cyber security,” said Pracheth Rao, senior director of SDV programs, BGSW.
“This new collaboration will enable customers to more effectively deploy software updates to all of the vehicle systems simultaneously,” added Sven Kappel, VP, product portfolio and architecture SDV, ETAS.
“By establishing standard interfaces, our update systems can easily connect with OEM and Tier 1 ECU software update mechanisms.”
Open-Source, Standardized Solution: 'Game-Changer' in Commercial Vehicle Space
Over the next few months, Cummins, Bosch BGSW, ETAS, and KPIT will continue to contribute to the Eclipse CANought project. These contributions will be analyzed and improved by the larger Eclipse SDV community as they are made production ready.
KPIT has been a software partner to Cummins for more than 20 years, noted Anup Sable, CTO, KPIT Technologies.
“This open-source, standardized solution, backed by Eclipse Foundation, will be a game-changer in the experience for engineering and service professionals in the commercial vehicle space.”
Eclipse Kanto and Eclipse CANought will be incorporated into telematics offerings being brought to market starting in 2025.
More Fleet Management

July Imports Poised to Set Container Record
The National Retail Federation projects July container imports will surpass the pandemic-era record as shippers frontload freight ahead of expected August tariff increases.
Read More →
HDT Announces 2026 Truck Fleet Innovator Finalists
From AI and fleet electrification to safety, operations, and leadership, these HDT Truck Fleet Innovator finalists are changing how trucking gets done.
Read More →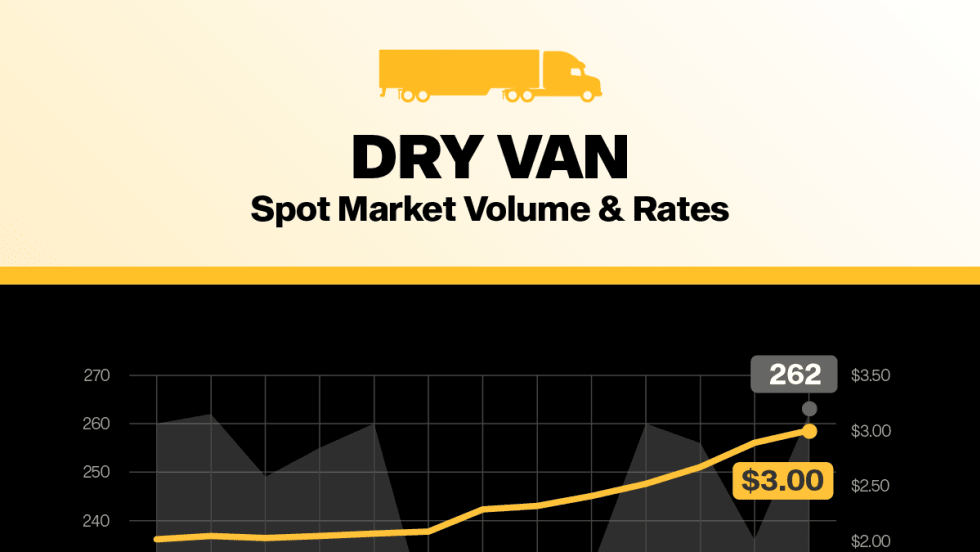
Van Spot Rates Top Contract Rates for First Time Since 2022
There’s more good economic news for the North American trucking industry according to the latest Truckload Volume Index report from DAT.
Read More →

Carrier Transicold Extends Refrigerated Trailer Life
Fleet Refresh enables refrigerated fleets to replace aging transport refrigeration units instead of entire trailers, while adding Lynx Fleet telematics and BluEdge service coverage.
Read More →
FTR Says Freight Rates Surged in May
FTR's Trucking Conditions Index surged to a record high in May, the analytics firm reports.
Read More →
Meet HDT's Truck Fleet Innovators at Heavy Duty Trucking Exchange
Heavy Duty Trucking Exchange brings fleet managers and suppliers together for the deeper conversations that lead to ideas, partnerships, and solutions. Time is running out to apply for HDTX, September 23-25.
Read More →
Enhance Fleet Performance with High-Efficiency Auxiliary Power Units
Drive sustainable cost savings while increasing driver comfort during short- and long-haul logistics operations.
Read More →
Is Your Parts Procurement Process Reactive or Proactive?
Ready to revamp your parts procurement process? Learn how now with “Strategic Parts Purchasing: A Process Checklist”
Read More →
What Trucking Events are Happening in 2026?
Looking for trucking-related conventions, expos, and other events? Heavy Duty Trucking has developed this list of national and larger regional trucking shows and events.
Read More →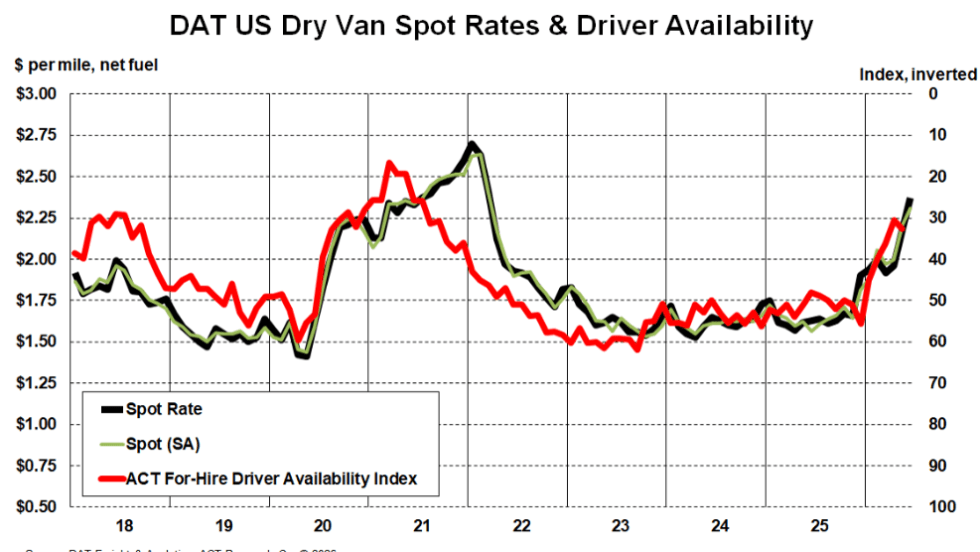
Truckload Rates Keep Rising as Tight Capacity Fuels Freight Market Recovery
Spot and contract rates continued climbing in May and June, not because freight demand is surging, but because fewer trucks and drivers are available.
Read More →